clusterduck
internet of things
LoRa
mesh network
mesh radio
open source
ad hoc networking, clusterduck protocol, disaster communications, ducklink, emergency wifi captive portal, esp32 lora mesh, hardware agnostic wireless protocol, iot wireless protocol, linux foundation iot, LoRa mesh network, lora vs lorawan, low bandwidth iot telemetry, mammaduck, off grid data link, open source mesh firmware, packet deduplication flooding, papaduck, peer to peer lora, project owl, semtech sx1262 mesh
9M2PJU
0 Comments
The ClusterDuck Protocol (CDP): Architectural Analysis of an Open-Source, Ad-Hoc LoRa Mesh Network
The resilience of communications infrastructure is frequently tested by extreme weather events and natural disasters. When conventional centralized telecommunications infrastructure, such as cellular towers, fiber optic backhauls, and localized power grids, is compromised, a critical informational vacuum forms. This vacuum directly hampers search and rescue logistics, civilian triage, and localized situational awareness.
The ClusterDuck Protocol (CDP) emerged as a direct technological countermeasure to this structural vulnerability. It is an open source, low bandwidth, mobile ad-hoc wireless mesh networking protocol designed to leverage LoRa (Long Range) radio frequencies. Operating under the governance of the Linux Foundation, CDP enables rapidly deployable, decentralized, point to multipoint communication networks that function completely independent of an active internet connection, cellular service, or pre-existing infrastructure grid.
1. Origin and Historical Trajectory
The Catalyst: Hurricane Maria (2017)
The structural blueprint for the ClusterDuck Protocol was forged in response to the humanitarian and infrastructural crises following Hurricane Maria in September 2017. When the Category 5 hurricane made landfall in Puerto Rico, it systematically decimated the island’s electrical grid and telecommunications networks. For weeks, massive segments of the population were completely cut off from emergency services, municipal governance, and medical aid resources.
The systemic failure demonstrated a critical engineering flaw in modern telecommunications: extreme reliance on centralized topologies. The complete destruction of backhaul points rendered functional edge devices like consumer smartphones useless for long range reporting.
The IBM Call for Code Global Challenge (2018)
In 2018, IBM launched its inaugural Call for Code Global Challenge, an international initiative prompting software engineers and developers to build open source applications capable of mitigating disaster vulnerabilities. In response, a distributed team of engineers, comprising Bryan Knouse, Nick Feuer, Charlie Evans, Taraqur Rahman, and Magus Pereira, conceptualized Project OWL (an acronym representing Organization, Whereabouts, and Logistics).
The team engineered an ad-hoc hardware and software solution that could be quickly introduced into a disaster zone to establish an immediate baseline of text based communication. The underlying firmware driving this mesh of physical devices was named the ClusterDuck Protocol.
[2017] Hurricane Maria Devastates Puerto Rico
│
▼
[2018] Project OWL Formed -> Wins IBM Call for Code ($200K Prize)
│
▼
[2020] Open-Source Transition -> Formally Hosted by The Linux Foundation
│
▼
[2024-2026] Refactored to V5.0.1 -> Integrated with Satellites & Advanced IoT
Project OWL secured the global grand prize out of more than 100,000 developers from 156 countries [Global Disaster Preparedness Center]. This provided the foundational capital ($200,000) and enterprise support from IBM’s Corporate Service Corps to validate, stress test, and deploy the protocol in real world simulated environments and pilot programs across regions prone to catastrophic typhoons and earthquakes, including the Philippines, India, and disaster prone areas of the United States [Global Disaster Preparedness Center].
The Move to the Linux Foundation
To ensure long term stability, neutral governance, and vendor agnostic community contributions, Project OWL transitioned the core firmware into a fully open source initiative. The protocol was formally accepted as a hosted project under the Linux Foundation [GitHub – ClusterDuck Protocol Organization]. This transition separated the open source transport layer (CDP) from the proprietary data management and analytics software scaled by OWL Integrations, allowing global developers to expand the protocol’s application domain into agricultural telemetry, industrial IoT, and remote environmental conservation tracking [Programming Electronics Academy].
2. Technical Philosophy: LoRa vs. LoRaWAN
Understanding the architecture of the ClusterDuck Protocol requires differentiating its physical and data link layers from the standard LoRaWAN deployment models. While both systems utilize Semtech’s proprietary chirp spread spectrum (CSS) radio modulation at the physical layer, their network topologies diverge entirely.
| Architectural Dimension | LoRaWAN Standard | ClusterDuck Protocol (CDP) |
| Topology Type | Star-of-Stars | Mobile Ad-Hoc Mesh (P2P) |
| Primary Dependency | Centralized Gateways / Internet Backhaul | Independent Node Peer-to-Peer Relays |
| Data Routing Model | Direct Single-Hop to Base Station | Multi-Hop Managed Flooding Scheme |
| Deployment Time | High (Requires site planning, tower height) | Low (Plug-and-play, drop-capable nodes) |
| Failure Modes | Gateway loss drops all dependent nodes | High fault tolerance via dynamic paths |
| Target Application | Dense, continuous commercial metering | Rapid off-grid emergency comms & dynamic IoT |
LoRaWAN forces an edge device to communicate directly with an internet connected gateway. If a hurricane knocks down the gateway tower, the entire area loses coverage.
Conversely, CDP establishes a true peer-to-peer mesh. Each active device acts as both an endpoint and a router. If an intermediate node fails, the data dynamically flows along alternative physical paths through neighboring nodes. This design prioritizes immediate, localized network survival over raw data throughput.
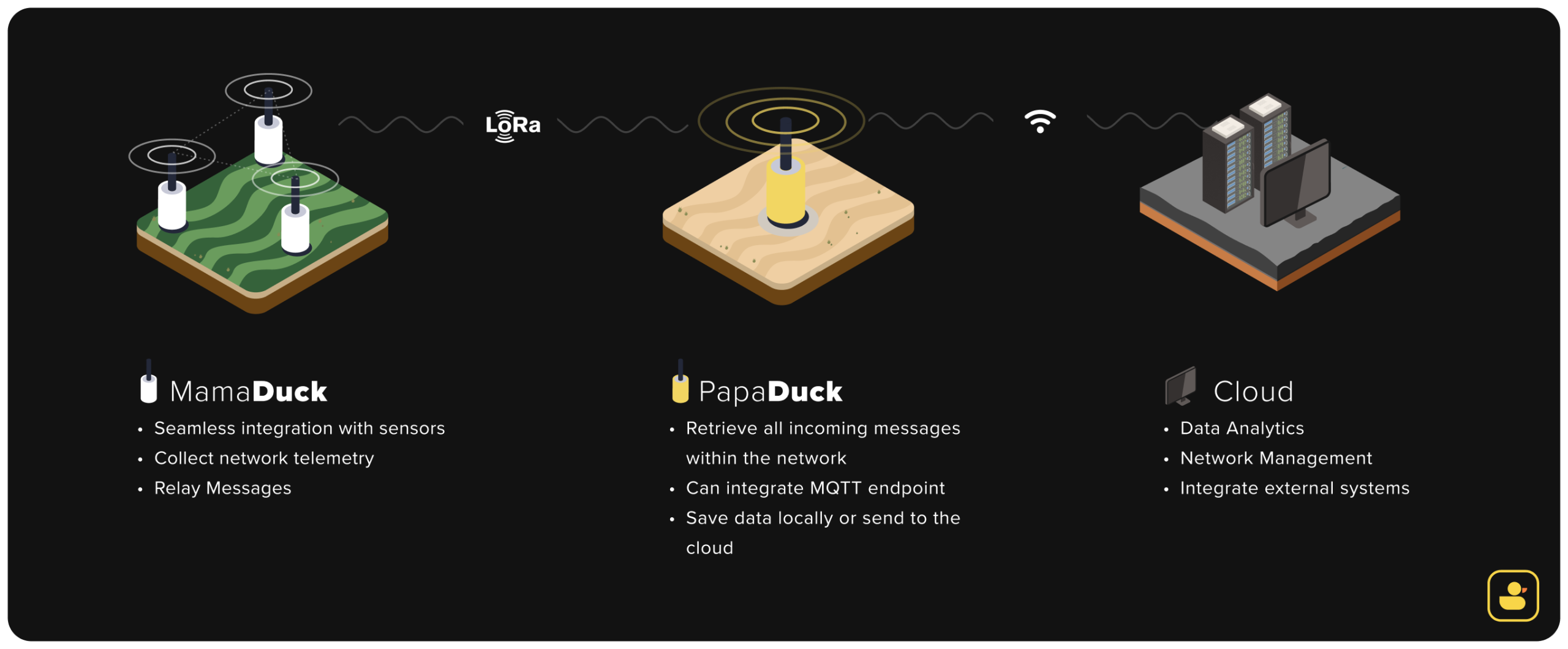
3. Node Architecture: The Three Types of “Ducks”
A ClusterDuck Protocol network is composed of physical nodes designated as Ducks. Each Duck runs a specific firmware flavor derived from the core library, defining its privileges, power management, and routing behavior within the mesh topology [GitHub – ClusterDuck-Protocol Main Repository].
┌──────────────┐
│ DuckLink │ (Leaf Node: Transmit Only)
└──────┬───────┘
│ (LoRa RF Link)
▼
┌──────────────┐
│ MamaDuck │ (Mesh Router: Relay / Deduplicate)
└──────┬───────┘
│ (Multi-Hop LoRa Mesh)
▼
┌──────────────┐
│ PapaDuck │ (Gateway Sink: LocalDB / MQTT Cloud)
└──────┬───────┘
│
┌────────────────┴────────────────┐
▼ ▼
┌──────────────┐ ┌──────────────┐
│ Local DB │ │ Cloud API │
│ (InfluxDB) │ │ (OWL DMS) │
└──────────────┘ └──────────────┘
1. DuckLink
The DuckLink operates as a strict leaf node at the edge of the mesh architecture [GitHub – ClusterDuck-Protocol Main Repository]. Its structural parameters are optimized for ultra low power consumption and localized environmental interrogation:
- Functionality: It interfaces directly with local sensor suites, such as GPS modules, DHT22 temperature sensors, and gas sensors, to package data fields into the protocol’s frame format.
- Routing Capability: Zero. A DuckLink can only transmit its own locally generated data frames or listen for direct acknowledgment packets. It will completely ignore standard ambient mesh traffic, meaning it consumes no processing power or battery reserves maintaining a routing table or repeating frames for other nodes [GitHub – ClusterDuck-Protocol Main Repository].
- Hardware Deployment: Typically deployed as small, enclosed, battery powered sensors attached to buildings, dropped as floating marine buoys, or integrated into wearables [Wi-Fi NOW Global].
2. MamaDuck
The MamaDuck forms the infrastructural routing core of the active mesh [GitHub – ClusterDuck-Protocol Main Repository].
- Functionality: It is configured with symmetric Rx/Tx (Receive/Transmit) capabilities. It continuously scans the designated LoRa channel frequencies for incoming packets emitted by DuckLinks or adjacent MamaDucks [GitHub – ClusterDuck-Protocol Main Repository].
- Routing Capability: Full Mesh Relay. Upon intercepting a packet, the MamaDuck processes the packet headers, verifies authenticity, checks for frame duplication, appends its unique identifier to the path tracking array, and broadcasts the frame forward toward the nearest network sink [GitHub – ClusterDuck-Protocol Main Repository].
- Optimization: To conserve critical processing cycles and memory on constrained microcontrollers, MamaDucks are stripped of complex Wi-Fi stacks and MQTT client software by default, ensuring all available hardware interrupts are dedicated purely to raw RF frame processing [GitHub – ClusterDuck-Protocol Main Repository].
3. PapaDuck
The PapaDuck operates as the terminal sink node, or root gateway, of the localized ClusterDuck network [GitHub – ClusterDuck-Protocol Main Repository].
- Functionality: It marks the boundary where the low bandwidth LoRa mesh interfaces with high bandwidth external networks. The PapaDuck decodes the encapsulated byte arrays received from the entire mesh topology [GitHub – ClusterDuck-Protocol Main Repository].
- Backhaul Integration: It leverages on-board Wi-Fi, Ethernet, or specialized satellite modems, such as Iridium or Starlink links, to pipe the aggregated data streams to their final destination [Digital Nomad Blog]. This is achieved by converting the protocol frames into standard MQTT payloads, which are pushed to cloud platforms like AWS IoT Core or the proprietary OWL Device Management Software (DMS) [GitHub – ClusterDuck-Protocol Main Repository].
- Edge Storage Fallback: If internet access is fully down at the PapaDuck’s physical location, it can drop the payloads directly into an edge-hosted database, such as a local InfluxDB instance or an SD card log, via an active serial or SPI bus [GitHub – ClusterDuck-Protocol Main Repository].
4. Frame Format and Data Link Layer Protocol
Because the transmission environment relies on LoRa, data throughput is intensely constrained by the laws of physics and regulatory duty cycles. A standard physical LoRa frame is ideally kept under 256 bytes to maintain reliable Link Budgets and minimize Time-on-Air (ToAir).
The ClusterDuck Protocol solves this by implementing a tightly packed, byte-aligned frame layout managed via the CdpPacket architecture.
Packet Struct Layout
┌─────────────────────────────────────────────────────────────────────────────┐
│ CDP HEADER (22 Bytes) │
├───────────────┬───────────────────────┬───────────────────────┬─────────────┤
│ MUID (4B) │ SUID (8B) │ DUID (8B) │ Topic (1B) │
├───────────────┴───────────────────────┴───────────────────────┴─────────────┤
│ PATH VECTOR & PAYLOAD SECTION │
├───────────────────────────────────────┬─────────────────────────────────────┤
│ Path Vector (Var) │ Payload (Var) │
└───────────────────────────────────────┴─────────────────────────────────────┘
The header components serve distinct routing and utility functions:
- Message Unique Identifier (MUID – 4 Bytes): A unique identifier generated per message via a pseudo-random hash function or sequential counter. The MUID is the foundational element for packet deduplication across the mesh layer.
- Source Unique Identifier (SUID – 8 Bytes): The hardcoded, immutable 8-character hardware/device identity sequence string corresponding to the Duck that originally created the data frame.
- Destination Unique Identifier (DUID – 8 Bytes): The target device ID intended to receive and parse the payload. For standard mesh dissemination where data is meant to find any available gateway, this defaults to a system-wide wildcard broadcast token (
BROADCAST_DUID) [GitHub – ClusterDuck-Protocol Main Repository]. - Topic Flag (1 Byte): Instead of wasting precious bytes transmitting verbose descriptive strings, like
"telemetry/climate/temperature", CDP uses a single byte-flag mapping system. Topics are mapped explicitly to raw integer allocations at compile-time:0x10maps totopics::healthfor internal battery and uptime status [GitHub – ClusterDuck-Protocol Main Repository]0x20maps totopics::sensorfor environmental telemetry arrays [GitHub – ClusterDuck-Protocol Main Repository]0x30maps totopics::alertfor high-priority emergency alerts [GitHub – ClusterDuck-Protocol Main Repository]
5. The Managed Flooding and Deduplication Algorithm
Routing in an ad-hoc, disaster-recovery mesh cannot rely on traditional dynamic routing protocols like OSPF, RIP, or complex distance-vector setups. In a chaotic environment, nodes constantly drop offline due to power exhaustion or physical displacement, which causes traditional routing tables to collapse under the weight of infinite route discovery loops.
To maintain resilience, CDP uses a modified Managed Flooding Algorithm paired with an tracking optimization called the Path Vector.
Deduplication via Circular Memory Cache
When a MamaDuck intercepts an ambient LoRa transmission, it does not blindly repeat it. Instead, it executes a rigorous validation sequence:
[ Incoming LoRa Frame Intercepted ]
│
▼
Is MUID in Local Ring Buffer?
├──► YES ──► [ Drop Frame Instantly ]
└──► NO ───┐
▼
Is Hop Count > Max Threshold?
├──► YES ──► [ Drop Frame Instantly ]
└──► NO ───┐
▼
Append Self to Path Vector Array
│
▼
Introduce Pseudo-Random Contention Delay
│
▼
[ Rebroadcast Frame Over the Air ]
Each routing node maintains a rolling circular memory array (MUID Cache). If an incoming MUID matches an entry in the local cache, the node knows it has already processed and relayed that exact frame. It drops the packet instantly, neutralizing infinite broadcast storms.
Path Vector and Network Geometry Mapping
As a frame travels through the mesh, every relaying MamaDuck appends its own 8-byte device ID to a variable tracking sequence at the tail end of the header called the Path Vector. When the packet finally arrives at the PapaDuck gateway, the complete hardware path is intact.
This mechanism serves a vital purpose: it maps network topology without routing overhead. The centralized monitoring software parses this vector array to dynamically draw a visual graph of the physical network layout, showing exactly which nodes are talking through which repeaters, all without requiring the nodes to exchange path-state updates.
Mitigation of Phase Cancellation
Because multiple MamaDucks may intercept a single DuckLink broadcast simultaneously, there is a high mathematical probability that they will attempt to repeat the frame at the exact same millisecond. This causes physical radio phase cancellation (collisions), corrupting the frame over the air.
CDP mitigates this by enforcing a pseudo-random jitter delay inside the execution thread. When a packet is cleared for relay, the firmware calculates a small delay window based on a combination of local true-random numbers and received signal strength indicators (RSSI). Nodes closer to the source or with cleaner signal profiles fire sooner, allowing other nodes to detect the busy channel via clear channel assessment (CCA) and back off.
6. Software Architecture and Zero-Cost Compiler Abstractions
The implementation firmware of CDP is written strictly in object-oriented C++ and designed to execute within resource-constrained bare-metal environments using frameworks like PlatformIO or the Arduino IDE core [GitHub – ClusterDuck-Protocol Main Repository, PlatformIO Registry].
Compile-Time Polymorphism via Templates
Microcontrollers used in IoT edge deployments, such as ESP32, ESP8266, and ATMega2560 chips, have severe static RAM and flash memory constraints. Standard C++ virtual method lookups introduce runtime overhead (vtables) and require bloated compilation sizes.
CDP bypasses this by relying heavily on C++ templates and compile-time policy configurations. This technique allows developers to specify exactly what drivers are compiled into the final binary file:
C++
// Instantiating a MamaDuck stripped completely of Wi-Fi drivers
MamaDuck<DuckWifiNone, DuckLora> duck("MAMA0002");
// Instantiating a PapaDuck with active Wi-Fi hardware abstraction layers
PapaDuck<DuckWifi::WiFiDriver> duck("PAPA0003");
When the compiler parses the code, any functions, libraries, or buffers related to Wi-Fi operations, captive portals, or TCP/IP stacks are completely omitted from the machine code if DuckWifiNone is specified [GitHub – ClusterDuck-Protocol Main Repository]. This keeps the memory footprint small, ensuring that low-tier 8-bit systems can execute edge-node tasks while advanced dual-core architectures handle heavy backhaul operations.
Non-Blocking Lifecycle Loop
To prevent the microcontrollers from freezing while processing heavy computational sequences or long RF time-on-air cycles, CDP enforces a non-blocking execution structure driven by a single method call: duck.run() [GitHub – ClusterDuck-Protocol Main Repository].
C++
void setup() {
duck.setupWithDefaults(); // Allocates hardware registers, tunes SPI bus to LoRa IC
}
void loop() {
duck.run(); // Executes the core state-machine asynchronously
}
The duck.run() routine acts as an independent task scheduler that handles three background threads during each loop iteration:
- Radio Interrogation: It polls the SPI bus lines connected to the LoRa transceiver, such as SX1276 or SX1262 chips, to check if an internal receive interrupt flag has flipped.
- Queue Management: It processes internal ring buffers holding pending transmissions, moving data frames from memory to the radio’s FIFO buffer as transmission slots open up.
- Internal Housekeeping: It runs local system watchdogs, tracking battery charge percentages, internal temperature baselines, and timing intervals for automated keep-alive bursts.
7. Real-World Applications and Evolving Horizons
While initially conceived for humanitarian aid and disaster management tracking, the structural adaptability of the ClusterDuck Protocol has led to its deployment across several alternative open source and commercial environments:
1. Captive Portal Emergency Hotspots
In a disaster zone, civilians do not have specialized LoRa radio nodes. To bridge this gap, MamaDucks can be configured to spin up an automated local Wi-Fi captive portal access point [Wi-Fi NOW Global].
When survivors search for Wi-Fi networks on their standard consumer smartphones, they see an open SSID named after the emergency network. Connecting to it automatically launches an offline browser screen. Here, they can input critical data, such as their medical needs, casualty counts, or GPS positions, into an HTML form [Global Disaster Preparedness Center]. The underlying MamaDuck receives this text data via Wi-Fi, packages it into a CdpPacket, compresses it, and injects it into the long range LoRa mesh to find a PapaDuck miles away [Wi-Fi NOW Global].
2. High-Density Event Mitigation
During massive localized gatherings, such as music festivals, political demonstrations, and sporting events, cell towers become saturated with data traffic, resulting in complete denial of service states for mobile users. CDP networks are used by event coordinators to deploy out of band sensor grids to monitor crowd densities, tracking medical assistance requests completely separated from the overloaded public network infrastructure.
3. Agricultural and Marine Telemetry
Because of the protocol’s capability to withstand rugged deployment factors, communities utilize the system to track soil nutrient vectors, microclimate fluctuations across massive agrarian acreage, and marine tracking metrics using floating, rubberized 3D-printed modular Duck enclosures [Global Disaster Preparedness Center, Wi-Fi NOW Global].
8. Summary of Technical Specifications
To implement a functional ClusterDuck network, developers must ground their hardware configurations in the standard operating parameters native to the protocol’s base layer:
- Supported Transceivers: Semtech SX1276, SX1278, SX1262, and RFM95W series modules [GitHub – ClusterDuck-Protocol Main Repository].
- Modulation Layer Parameters: Configured dynamically, but typically optimized at Spreading Factor 7 to 9 (SF7 to SF9) for optimal balanced trade-offs between physical building penetration and minimal Time-on-Air footprint.
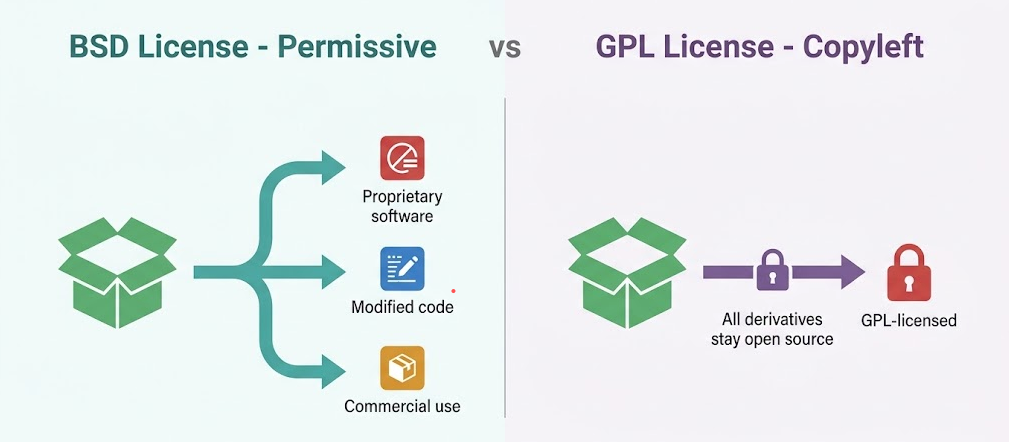
- Open Source Licensing: Fully licensed under the Apache 2.0 License, granting public entities and private developers full permissions for modification, deployment, commercial distribution, and private code branching without restrictive copyleft requirements [GitHub – ClusterDuck-Protocol Main Repository].
- Software Dependencies: Compiles clean alongside common open source embedded libraries including
ArduinoJson,PubSubClientfor MQTT management, andU8g2for driving external OLED physical display parameters [PlatformIO Registry].



Post Comment